| 模型 | 模型下载链接 | mAP(%) | NDS | 介绍 |
|---|---|---|---|---|
| BEVFusion | 推理模型/训练模型 | 53.9 | 60.9 | BEVFusion是一种在BEV视角下的多模态融合模型,采用两个分支处理不同模态的数据,得到lidar和camera在BEV视角下的特征,camera分支采用LSS这种自底向上的方式来显式的生成图像BEV特征,lidar分支采用经典的点云检测网络,最后对两种模态的BEV特征进行对齐和融合,应用于检测head或分割head |
| 模式 | GPU配置 | CPU配置 | 加速技术组合 |
|---|---|---|---|
| 常规模式 | FP32精度 / 无TRT加速 | FP32精度 / 8线程 | PaddleInference |
| 高性能模式 | 选择先验精度类型和加速策略的最优组合 | FP32精度 / 8线程 | 选择先验最优后端(Paddle/OpenVINO/TRT等) |
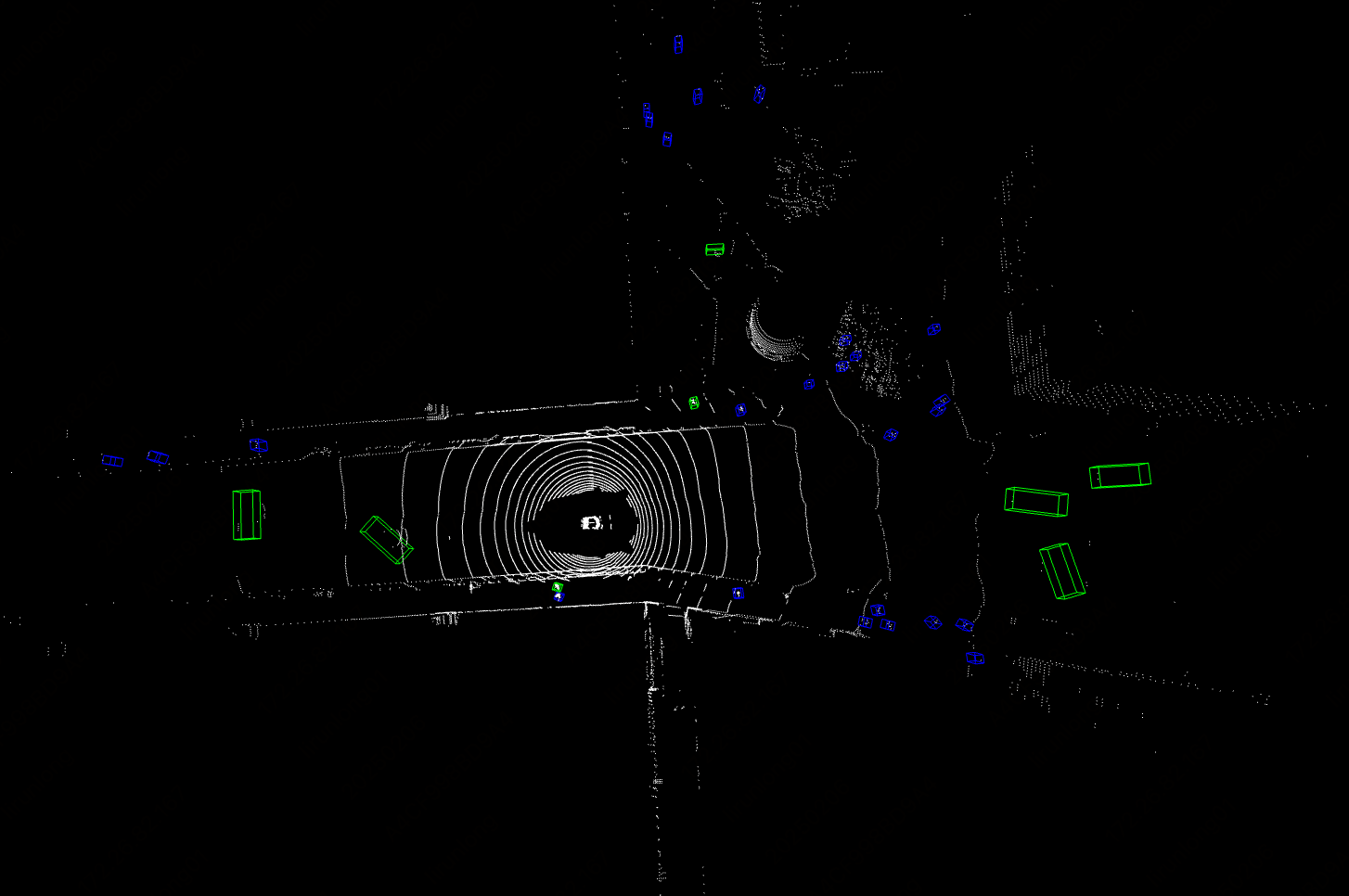 运行后,得到的结果为:
```bash
{"res":
{
'input_path': 'samples/LIDAR_TOP/n015-2018-10-08-15-36-50+0800__LIDAR_TOP__1538984253447765.pcd.bin',
'sample_id': 'b4ff30109dd14c89b24789dc5713cf8c',
'input_img_paths': [
'samples/CAM_FRONT_LEFT/n015-2018-10-08-15-36-50+0800__CAM_FRONT_LEFT__1538984253404844.jpg',
'samples/CAM_FRONT/n015-2018-10-08-15-36-50+0800__CAM_FRONT__1538984253412460.jpg',
'samples/CAM_FRONT_RIGHT/n015-2018-10-08-15-36-50+0800__CAM_FRONT_RIGHT__1538984253420339.jpg',
'samples/CAM_BACK_RIGHT/n015-2018-10-08-15-36-50+0800__CAM_BACK_RIGHT__1538984253427893.jpg',
'samples/CAM_BACK/n015-2018-10-08-15-36-50+0800__CAM_BACK__1538984253437525.jpg',
'samples/CAM_BACK_LEFT/n015-2018-10-08-15-36-50+0800__CAM_BACK_LEFT__1538984253447423.jpg'
]
"boxes_3d": [
[
14.5425386428833,
22.142045974731445,
-1.2903141975402832,
1.8441576957702637,
4.433370113372803,
1.7367216348648071,
6.367165565490723,
0.0036598597653210163,
-0.013568558730185032
]
],
"labels_3d": [
0
],
"scores_3d": [
0.9920279383659363
]
}
}
```
运行结果参数含义如下:
- `input_path`:表示输入待预测样本的输入点云数据路径
- `sample_id`:表示输入待预测样本的输入样本的唯一标识符
- `input_img_paths`:表示输入待预测样本的输入图像数据路径
- `boxes_3d`:表示该3D样本的所有预测框信息, 每个预测框信息为一个长度为9的列表, 各元素分别表示:
- 0: 中心点x坐标
- 1: 中心点y坐标
- 2: 中心点z坐标
- 3: 检测框宽度
- 4: 检测框长度
- 5: 检测框高度
- 6: 旋转角度
- 7: 坐标系x方向速度
- 8: 坐标系y方向速度
- `labels_3d`:表示该3D样本的所有预测框对应的预测类别
- `scores_3d`:表示文该3D样本的所有预测框对应的置信度
相关方法、参数等说明如下:
* `create_model`实例化3D检测模型(此处以`BEVFusion`为例),具体说明如下:
运行后,得到的结果为:
```bash
{"res":
{
'input_path': 'samples/LIDAR_TOP/n015-2018-10-08-15-36-50+0800__LIDAR_TOP__1538984253447765.pcd.bin',
'sample_id': 'b4ff30109dd14c89b24789dc5713cf8c',
'input_img_paths': [
'samples/CAM_FRONT_LEFT/n015-2018-10-08-15-36-50+0800__CAM_FRONT_LEFT__1538984253404844.jpg',
'samples/CAM_FRONT/n015-2018-10-08-15-36-50+0800__CAM_FRONT__1538984253412460.jpg',
'samples/CAM_FRONT_RIGHT/n015-2018-10-08-15-36-50+0800__CAM_FRONT_RIGHT__1538984253420339.jpg',
'samples/CAM_BACK_RIGHT/n015-2018-10-08-15-36-50+0800__CAM_BACK_RIGHT__1538984253427893.jpg',
'samples/CAM_BACK/n015-2018-10-08-15-36-50+0800__CAM_BACK__1538984253437525.jpg',
'samples/CAM_BACK_LEFT/n015-2018-10-08-15-36-50+0800__CAM_BACK_LEFT__1538984253447423.jpg'
]
"boxes_3d": [
[
14.5425386428833,
22.142045974731445,
-1.2903141975402832,
1.8441576957702637,
4.433370113372803,
1.7367216348648071,
6.367165565490723,
0.0036598597653210163,
-0.013568558730185032
]
],
"labels_3d": [
0
],
"scores_3d": [
0.9920279383659363
]
}
}
```
运行结果参数含义如下:
- `input_path`:表示输入待预测样本的输入点云数据路径
- `sample_id`:表示输入待预测样本的输入样本的唯一标识符
- `input_img_paths`:表示输入待预测样本的输入图像数据路径
- `boxes_3d`:表示该3D样本的所有预测框信息, 每个预测框信息为一个长度为9的列表, 各元素分别表示:
- 0: 中心点x坐标
- 1: 中心点y坐标
- 2: 中心点z坐标
- 3: 检测框宽度
- 4: 检测框长度
- 5: 检测框高度
- 6: 旋转角度
- 7: 坐标系x方向速度
- 8: 坐标系y方向速度
- `labels_3d`:表示该3D样本的所有预测框对应的预测类别
- `scores_3d`:表示文该3D样本的所有预测框对应的置信度
相关方法、参数等说明如下:
* `create_model`实例化3D检测模型(此处以`BEVFusion`为例),具体说明如下:
| 参数 | 参数说明 | 参数类型 | 可选项 | 默认值 |
|---|---|---|---|---|
model_name |
模型名称 | str |
无 | BEVFusion |
model_dir |
模型存储路径 | str |
无 | 无 |
device |
模型推理设备 | str |
支持指定GPU具体卡号,如“gpu:0”,其他硬件具体卡号,如“npu:0”,CPU如“cpu”。 | gpu:0 |
use_hpip |
是否启用高性能推理 | bool |
无 | False |
| 参数 | 参数说明 | 参数类型 | 可选项 | 默认值 |
|---|---|---|---|---|
input |
待预测数据,支持多种输入类型 | str/list |
|
无 |
batch_size |
批大小 | int |
任意整数 | 1 |
| 方法 | 方法说明 | 参数 | 参数类型 | 参数说明 | 默认值 |
|---|---|---|---|---|---|
print() |
打印结果到终端 | format_json |
bool |
是否对输出内容进行使用 JSON 缩进格式化 |
True |
indent |
int |
指定缩进级别,以美化输出的 JSON 数据,使其更具可读性,仅当 format_json 为 True 时有效 |
4 | ||
ensure_ascii |
bool |
控制是否将非 ASCII 字符转义为 Unicode。设置为 True 时,所有非 ASCII 字符将被转义;False 则保留原始字符,仅当format_json为True时有效 |
False |
||
save_to_json() |
将结果保存为json格式的文件 | save_path |
str |
保存的文件路径,当为目录时,保存文件命名与输入文件类型命名一致 | 无 |
indent |
int |
指定缩进级别,以美化输出的 JSON 数据,使其更具可读性,仅当 format_json 为 True 时有效 |
4 | ||
ensure_ascii |
bool |
控制是否将非 ASCII 字符转义为 Unicode。设置为 True 时,所有非 ASCII 字符将被转义;False 则保留原始字符,仅当format_json为True时有效 |
False |
| 属性 | 属性说明 |
|---|---|
json |
获取预测的json格式的结果 |
校验结果文件具体内容为:
{
"done_flag": true,
"check_pass": true,
"attributes": {
"num_classes": 11,
"train_mate": [
{
"sample_idx": "f9878012c3f6412184c294c13ba4bac3",
"lidar_path": "./data/nuscenes/samples/LIDAR_TOP/n008-2018-05-21-11-06-59-0400__LIDAR_TOP__1526915243047392.pcd.bin",
"image_paths" [
"./data/nuscenes/samples/CAM_FRONT_LEFT/n008-2018-05-21-11-06-59-0400__CAM_FRONT_LEFT__1526915243004917.jpg",
"./data/nuscenes/samples/CAM_FRONT/n008-2018-05-21-11-06-59-0400__CAM_FRONT__1526915243012465.jpg",
"./data/nuscenes/samples/CAM_FRONT_RIGHT/n008-2018-05-21-11-06-59-0400__CAM_FRONT_RIGHT__1526915243019956.jpg",
"./data/nuscenes/samples/CAM_BACK_RIGHT/n008-2018-05-21-11-06-59-0400__CAM_BACK_RIGHT__1526915243027813.jpg",
"./data/nuscenes/samples/CAM_BACK/n008-2018-05-21-11-06-59-0400__CAM_BACK__1526915243037570.jpg",
"./data/nuscenes/samples/CAM_BACK_LEFT/n008-2018-05-21-11-06-59-0400__CAM_BACK_LEFT__1526915243047295.jpg"
]
},
],
"val_mate": [
{
"sample_idx": "30e55a3ec6184d8cb1944b39ba19d622",
"lidar_path": "./data/nuscenes/samples/LIDAR_TOP/n015-2018-07-11-11-54-16+0800__LIDAR_TOP__1531281439800013.pcd.bin",
"image_paths": [
"./data/nuscenes/samples/CAM_FRONT_LEFT/n015-2018-07-11-11-54-16+0800__CAM_FRONT_LEFT__1531281439754844.jpg",
"./data/nuscenes/samples/CAM_FRONT/n015-2018-07-11-11-54-16+0800__CAM_FRONT__1531281439762460.jpg",
"./data/nuscenes/samples/CAM_FRONT_RIGHT/n015-2018-07-11-11-54-16+0800__CAM_FRONT_RIGHT__1531281439770339.jpg",
"./data/nuscenes/samples/CAM_BACK_RIGHT/n015-2018-07-11-11-54-16+0800__CAM_BACK_RIGHT__1531281439777893.jpg",
"./data/nuscenes/samples/CAM_BACK/n015-2018-07-11-11-54-16+0800__CAM_BACK__1531281439787525.jpg",
"./data/nuscenes/samples/CAM_BACK_LEFT/n015-2018-07-11-11-54-16+0800__CAM_BACK_LEFT__1531281439797423.jpg"
]
},
]
},
"analysis": {
"histogram": "check_dataset/histogram.png"
},
"dataset_path": "/workspace/bevfusion/Paddle3D/data/nuscenes",
"show_type": "txt",
"dataset_type": "NuscenesMMDataset"
}
上述校验结果中,check_pass 为 true 表示数据集格式符合要求
3D多模态融合检测模块不支持数据格式转换与数据集划分。
output,如需指定保存路径,可通过配置文件中 -o Global.output 字段进行设置。在完成模型训练后,所有产出保存在指定的输出目录(默认为./output/)下,通常有以下产出:
train_result.json:训练结果记录文件,记录了训练任务是否正常完成,以及产出的权重指标、相关文件路径等;
train.log:训练日志文件,记录了训练过程中的模型指标变化、loss 变化等;config.yaml:训练配置文件,记录了本次训练的超参数的配置;.pdparams、.pdopt、.pdiparams、.pdmodel:模型权重相关文件,包括网络参数、优化器、静态图网络参数、静态图网络结构等;在模型评估时,需要指定模型权重文件路径,每个配置文件中都内置了默认的权重保存路径,如需要改变,只需要通过追加命令行参数的形式进行设置即可,如-o Evaluate.weight_path=./output/best_model/best_model.pdparams。
在完成模型评估后,会产出evaluate_result.json,其记录了评估的结果,具体来说,记录了评估任务是否正常完成,以及模型的评估指标,包含 mAP, NDS;