---
comments: true
---
# 旋转目标检测模块使用教程
## 一、概述
旋转目标检测是目标检测模块中的一种衍生,它专门针对旋转目标进行检测。旋转框(Rotated Bounding Boxes)常用于检测带有角度信息的矩形框,即矩形框的宽和高不再与图像坐标轴平行。相较于水平矩形框,旋转矩形框一般包括更少的背景信息。旋转框检测常用于遥感等场景中。
## 二、支持模型列表
| 模型 | 模型下载链接 |
mAP(%) |
GPU推理耗时 (ms) |
CPU推理耗时 (ms) |
模型存储大小 (M) |
介绍 |
| PP-YOLOE-R_L | 推理模型/训练模型 |
78.14 |
20.7039 |
157.942 |
211.0 M |
PP-YOLOE-R是一个高效的单阶段Anchor-free旋转框检测模型。基于PP-YOLOE, PP-YOLOE-R以极少的参数量和计算量为代价,引入了一系列有用的设计来提升检测精度。 |
注:以上精度指标为DOTA验证集 mAP(0.5:0.95)。所有模型 GPU 推理耗时基于 NVIDIA TRX2080 Ti 机器,精度类型为 F16, CPU 推理速度基于 Intel(R) Xeon(R) Gold 5117 CPU @ 2.00GHz,线程数为8,精度类型为 FP32。
> ❗ 以上列出的是paddleX当前支持的旋转目标检测模型,实际的PaddleDetection套件支持10个旋转目标检测模型,详细模型列表请参考PaddleDetection
## 三、快速集成
> ❗ 在快速集成前,请先安装 PaddleX 的 wheel 包,详细请参考 [PaddleX本地安装教程](../../../installation/installation.md)
完成 wheel 包的安装后,几行代码即可完成旋转目标检测模块的推理,可以任意切换该模块下的模型,您也可以将旋转目标检测的模块中的模型推理集成到您的项目中。运行以下代码前,请您下载[示例图片](https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/rotated_object_detection_001.png)到本地。
```python
from paddlex import create_model
model = create_model("PP-YOLOE-R_L")
output = model.predict("rotated_object_detection_001.png", batch_size=1)
for res in output:
res.print(json_format=False)
res.save_to_img("./output/")
res.save_to_json("./output/res.json")
```
关于更多 PaddleX 的单模型推理的 API 的使用方法,可以参考[PaddleX单模型Python脚本使用说明](../../instructions/model_python_API.md)。
## 四、二次开发
如果你追求更高精度的现有模型,可以使用 PaddleX 的二次开发能力,开发更好的旋转目标检测模型。在使用 PaddleX 开发旋转目标检测模型之前,请务必安装 PaddleX的旋转目标检测相关模型训练插件,安装过程可以参考 [PaddleX本地安装教程](../../../installation/installation.md)
### 4.1 数据准备
在进行模型训练前,需要准备相应任务模块的数据集。PaddleX 针对每一个模块提供了数据校验功能,只有通过数据校验的数据才可以进行模型训练。此外,PaddleX 为每一个模块都提供了 Demo 数据集,您可以基于官方提供的 Demo 数据完成后续的开发。若您希望用私有数据集进行后续的模型训练,可以参考[PaddleX目标检测任务模块数据标注教程](../../../data_annotations/cv_modules/object_detection.md)。
#### 4.1.1 Demo 数据下载
您可以参考下面的命令将 Demo 数据集下载到指定文件夹:
```bash
wget https://paddle-model-ecology.bj.bcebos.com/paddlex/data/rdet_dota_examples.tar -P ./dataset
tar -xf ./dataset/rdet_dota_examples.tar -C ./dataset/
```
解压后,数据集目录结构如下:
```bash
- dataset/DOTA-sampled200_crop1024_data
- annotations
- instance_train.json
- instance_val.json
- images
- img1.png
- img2.png
- img3.png
...
```
#### 4.1.2 数据校验
一行命令即可完成数据校验:
```bash
python main.py -c paddlex/configs/rotated_object_detection/PP-YOLOE-R_L.yaml \
-o Global.mode=check_dataset \
-o Global.dataset_dir=./dataset/DOTA-sampled200_crop1024_data
```
执行上述命令后,PaddleX 会对数据集进行校验,并统计数据集的基本信息,命令运行成功后会在log中打印出`Check dataset passed !`信息。校验结果文件保存在`./output/check_dataset_result.json`,同时相关产出会保存在当前目录的`./output/check_dataset`目录下,产出目录中包括可视化的示例样本图片和样本分布直方图。
👉 校验结果详情(点击展开)
校验结果文件具体内容为:
{
"done_flag": true,
"check_pass": true,
"attributes": {
"num_classes": 15,
"train_samples": 1892,
"train_sample_paths": [
"check_dataset\/demo_img\/P2610__1.0__0___0.png",
"check_dataset\/demo_img\/P1137__1.0__0___0.png",
"check_dataset\/demo_img\/P1122__1.0__5888___1648.png",
"check_dataset\/demo_img\/P0543__1.0__0___0.png",
"check_dataset\/demo_img\/P0518__1.0__0___91.png",
"check_dataset\/demo_img\/P0961__1.0__1648___87.png",
"check_dataset\/demo_img\/P1732__1.0__0___824.png",
"check_dataset\/demo_img\/P2766__1.0__4421___0.png",
"check_dataset\/demo_img\/P2582__1.0__674___725.png",
"check_dataset\/demo_img\/P1529__1.0__2976___1648.png"
],
"val_samples": 473,
"val_sample_paths": [
"check_dataset\/demo_img\/P2342__1.0__890___0.png",
"check_dataset\/demo_img\/P1386__1.0__2472___1648.png",
"check_dataset\/demo_img\/P0961__1.0__824___87.png",
"check_dataset\/demo_img\/P1651__1.0__824___824.png",
"check_dataset\/demo_img\/P1529__1.0__824___2976.png",
"check_dataset\/demo_img\/P0961__1.0__4944___87.png",
"check_dataset\/demo_img\/P0725__1.0__634___0.png",
"check_dataset\/demo_img\/P1679__1.0__1648___1648.png",
"check_dataset\/demo_img\/P2726__1.0__824___1578.png",
"check_dataset\/demo_img\/P0457__1.0__379___0.png",
]
},
"analysis": {
"histogram": "check_dataset/histogram.png"
},
"dataset_path": "./dataset/DOTA-sampled200_crop1024_data",
"show_type": "image",
"dataset_type": "COCODetDataset"
}
上述校验结果中,check_pass 为 true 表示数据集格式符合要求,其他部分指标的说明如下:
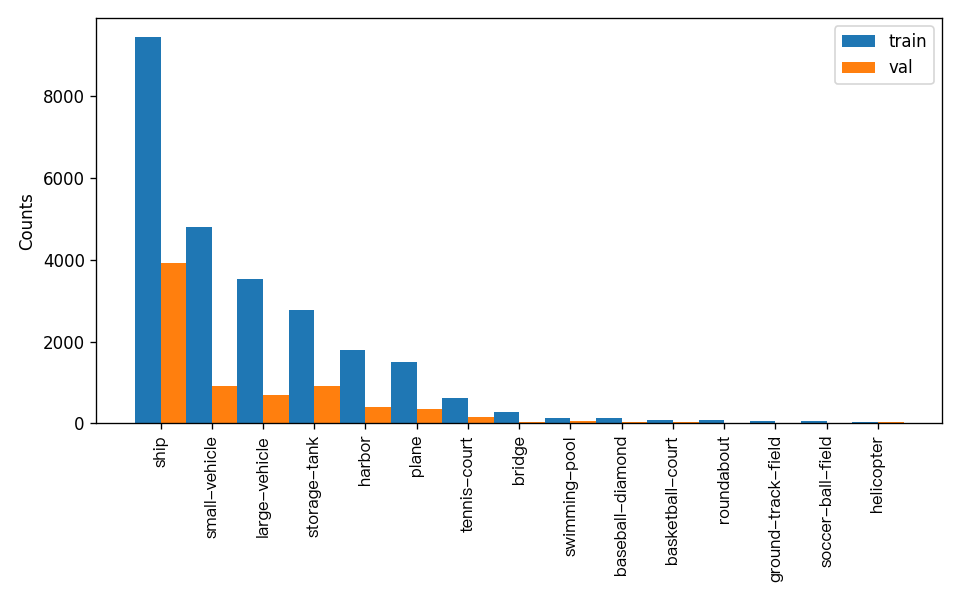
attributes.num_classes:该数据集类别数为 15;attributes.train_samples:该数据集训练集样本数量为 1892;attributes.val_samples:该数据集验证集样本数量为 473;attributes.train_sample_paths:该数据集训练集样本可视化图片相对路径列表;attributes.val_sample_paths:该数据集验证集样本可视化图片相对路径列表;
另外,数据集校验还对数据集中所有类别的样本数量分布情况进行了分析,并绘制了分布直方图(histogram.png):
👉 格式转换/数据集划分详情(点击展开)
(1)数据集格式转换
旋转目标检测赞不支持数据格式转换,只支持标准DOTA的COCO数据格式。
(2)数据集划分
数据集划分的参数可以通过修改配置文件中 CheckDataset 下的字段进行设置,配置文件中部分参数的示例说明如下:
CheckDataset:split:enable: 是否进行重新划分数据集,为 True 时进行数据集格式转换,默认为 False;train_percent: 如果重新划分数据集,则需要设置训练集的百分比,类型为0-100之间的任意整数,需要保证和 val_percent 值加和为100;val_percent: 如果重新划分数据集,则需要设置验证集的百分比,类型为0-100之间的任意整数,需要保证和 train_percent 值加和为100;
例如,您想重新划分数据集为 训练集占比90%、验证集占比10%,则需将配置文件修改为:
......
CheckDataset:
......
split:
enable: True
train_percent: 90
val_percent: 10
......
随后执行命令:
python main.py -c paddlex/configs/rotated_object_detection/PP-YOLOE-R_L.yaml \
-o Global.mode=check_dataset \
-o Global.dataset_dir=./dataset/DOTA-sampled200_crop1024_data
数据划分执行之后,原有标注文件会被在原路径下重命名为 xxx.bak。
以上参数同样支持通过追加命令行参数的方式进行设置:
python main.py -c paddlex/configs/rotated_object_detection/PP-YOLOE-R_L.yaml \
-o Global.mode=check_dataset \
-o Global.dataset_dir=./dataset/DOTA-sampled200_crop1024_data \
-o CheckDataset.split.enable=True \
-o CheckDataset.split.train_percent=90 \
-o CheckDataset.split.val_percent=10
👉 更多说明(点击展开)
👉 更多说明(点击展开)
在模型评估时,需要指定模型权重文件路径,每个配置文件中都内置了默认的权重保存路径,如需要改变,只需要通过追加命令行参数的形式进行设置即可,如-o Evaluate.weight_path=./output/best_model/best_model.pdparams。
在完成模型评估后,会产出evaluate_result.json,其记录了评估的结果,具体来说,记录了评估任务是否正常完成,以及模型的评估指标,包含 AP;