
image_classification.md 30 KB
简体中文 | English
图像分类模块使用教程
一、概述
图像分类模块是计算机视觉系统中的关键组成部分,负责对输入的图像进行分类。该模块的性能直接影响到整个计算机视觉系统的准确性和效率。图像分类模块通常会接收图像作为输入,然后通过深度学习或其他机器学习算法,根据图像的特性和内容,将其分类到预定义的类别中。例如,对于一个动物识别系统,图像分类模块可能需要将输入的图像分类为“猫”、“狗”、“马”等类别。图像分类模块的分类结果将作为输出,供其他模块或系统使用。
二、支持模型列表
| 模型 | Top1 Acc(%) | GPU推理耗时 (ms) | CPU推理耗时 (ms) | 模型存储大小 (M) |
|---|---|---|---|---|
| CLIP_vit_base_patch16_224 | 85.36 | 13.1957 | 285.493 | 306.5 M |
| MobileNetV3_small_x1_0 | 68.2 | 6.00993 | 12.9598 | 10.5 M |
| PP-HGNet_small | 81.51 | 5.50661 | 119.041 | 86.5 M |
| PP-HGNetV2-B0 | 77.77 | 6.53694 | 23.352 | 21.4 M |
| PP-HGNetV2-B4 | 83.57 | 9.66407 | 54.2462 | 70.4 M |
| PP-HGNetV2-B6 | 86.30 | 21.226 | 255.279 | 268.4 M |
| PP-LCNet_x1_0 | 71.32 | 3.84845 | 9.23735 | 10.5 M |
| ResNet50 | 76.5 | 9.62383 | 64.8135 | 90.8 M |
| SwinTransformer_tiny_patch4_window7_224 | 81.10 | 8.54846 | 156.306 | 100.1 M |
❗ 以上列出的是图像分类模块重点支持的9个核心模型,该模块总共支持80个模型,完整的模型列表如下:
👉模型列表详情
<th>模型</th> <th>Top1 Acc(%)</th> <th>GPU推理耗时 (ms)</th> <th>CPU推理耗时 (ms)</th> <th>模型存储大小 (M)</th> <th>介绍</th><td>CLIP_vit_base_patch16_224</td> <td>85.36</td> <td>13.1957</td> <td>285.493</td> <td >306.5 M</td> <td rowspan="2">CLIP是一种基于视觉和语言相关联的图像分类模型,采用对比学习和预训练方法,实现无监督或弱监督的图像分类,尤其适用于大规模数据集。模型通过将图像和文本映射到同一表示空间,学习到通用特征,具有良好的泛化能力和解释性。其在较好的训练误差,在很多下游任务都有较好的表现。</td><td>CLIP_vit_large_patch14_224</td> <td>88.1</td> <td>51.1284</td> <td>1131.28</td> <td>1.04 G</td><td>ConvNeXt_base_224</td> <td>83.84</td> <td>12.8473</td> <td>1513.87</td> <td>313.9 M</td> <td rowspan="6">ConvNeXt系列模型是Meta在2022年提出的基于CNN架构的模型。该系列模型是在ResNet的基础上,通过借鉴SwinTransformer的优点设计,包括训练策略和网络结构的优化思路,从而改进的纯CNN架构网络,探索了卷积神经网络的性能上限。ConvNeXt系列模型具备卷积神经网络的诸多优点,包括推理效率高和易于迁移到下游任务等。</td><td>ConvNeXt_base_384</td> <td>84.90</td> <td>31.7607</td> <td>3967.05</td> <td>313.9 M</td><td>ConvNeXt_large_224</td> <td>84.26</td> <td>26.8103</td> <td>2463.56</td> <td>700.7 M</td><td>ConvNeXt_large_384</td> <td>85.27</td> <td>66.4058</td> <td>6598.92</td> <td>700.7 M</td><td>ConvNeXt_small</td> <td>83.13</td> <td>9.74075</td> <td>1127.6</td> <td>178.0 M</td><td>ConvNeXt_tiny</td> <td>82.03</td> <td>5.48923</td> <td>672.559</td> <td>104.1 M</td><td>FasterNet-L</td> <td>83.5</td> <td>23.4415</td> <td>-</td> <td>357.1 M</td> <td rowspan="6">FasterNet是一个旨在提高运行速度的神经网络,改进点主要如下:<br> 1.重新审视了流行的运算符,发现低FLOPS主要来自于运算频繁的内存访问,特别是深度卷积;<br> 2.提出了部分卷积(PConv),通过减少冗余计算和内存访问来更高效地提取图像特征;<br> 3.基于PConv推出了FasterNet系列模型,这是一种新的设计方案,在不影响模型任务性能的情况下,在各种设备上实现了显著更高的运行速度。</td><td>FasterNet-M</td> <td>83.0</td> <td>21.8936</td> <td>-</td> <td>204.6 M</td><td>FasterNet-S</td> <td>81.3</td> <td>13.0409</td> <td>-</td> <td>119.3 M</td><td>FasterNet-T0</td> <td>71.9</td> <td>12.2432</td> <td>-</td> <td>15.1 M</td><td>FasterNet-T1</td> <td>75.9</td> <td>11.3562</td> <td>-</td> <td>29.2 M</td><td>FasterNet-T2</td> <td>79.1</td> <td>10.703</td> <td>-</td> <td>57.4 M</td><td>MobileNetV1_x0_5</td> <td>63.5</td> <td>1.86754</td> <td>7.48297</td> <td>4.8 M</td> <td rowspan="4">MobileNetV1是Google于2017年发布的用于移动设备或嵌入式设备中的网络。该网络将传统的卷积操作拆解成深度可分离卷积,即Depthwise卷积和Pointwise卷积的组合。相比传统的卷积网络,该组合可以大大节省参数量和计算量。同时该网络可以用于图像分类等其他视觉任务中。</td><td>MobileNetV1_x0_25</td> <td>51.4</td> <td>1.83478</td> <td>4.83674</td> <td>1.8 M</td><td>MobileNetV1_x0_75</td> <td>68.8</td> <td>2.57903</td> <td>10.6343</td> <td>9.3 M</td><td>MobileNetV1_x1_0</td> <td>71.0</td> <td>2.78781</td> <td>13.98</td> <td>15.2 M</td><td>MobileNetV2_x0_5</td> <td>65.0</td> <td>4.94234</td> <td>11.1629</td> <td>7.1 M</td> <td rowspan="5">MobileNetV2是Google继MobileNetV1提出的一种轻量级网络。相比MobileNetV1,MobileNetV2提出了Linear bottlenecks与Inverted residual block作为网络基本结构,通过大量地堆叠这些基本模块,构成了MobileNetV2的网络结构。最后,在FLOPs只有MobileNetV1的一半的情况下取得了更高的分类精度。</td><td>MobileNetV2_x0_25</td> <td>53.2</td> <td>4.50856</td> <td>9.40991</td> <td>5.5 M</td><td>MobileNetV2_x1_0</td> <td>72.2</td> <td>6.12159</td> <td>16.0442</td> <td>12.6 M</td><td>MobileNetV2_x1_5</td> <td>74.1</td> <td>6.28385</td> <td>22.5129</td> <td>25.0 M</td><td>MobileNetV2_x2_0</td> <td>75.2</td> <td>6.12888</td> <td>30.8612</td> <td>41.2 M</td><td>MobileNetV3_large_x0_5</td> <td>69.2</td> <td>6.31302</td> <td>14.5588</td> <td>9.6 M</td> <td rowspan="10">MobileNetV3是Google于2019年提出的一种基于NAS的轻量级网络。为了进一步提升效果,将relu和sigmoid激活函数分别替换为hard_swish与hard_sigmoid激活函数,同时引入了一些专门为减少网络计算量的改进策略。</td><td>MobileNetV3_large_x0_35</td> <td>64.3</td> <td>5.76207</td> <td>13.9041</td> <td>7.5 M</td><td>MobileNetV3_large_x0_75</td> <td>73.1</td> <td>8.41737</td> <td>16.9506</td> <td>14.0 M</td><td>MobileNetV3_large_x1_0</td> <td>75.3</td> <td>8.64112</td> <td>19.1614</td> <td>19.5 M</td><td>MobileNetV3_large_x1_25</td> <td>76.4</td> <td>8.73358</td> <td>22.1296</td> <td>26.5 M</td><td>MobileNetV3_small_x0_5</td> <td>59.2</td> <td>5.16721</td> <td>11.2688</td> <td>6.8 M</td><td>MobileNetV3_small_x0_35</td> <td>53.0</td> <td>5.22053</td> <td>11.0055</td> <td>6.0 M</td><td>MobileNetV3_small_x0_75</td> <td>66.0</td> <td>5.39831</td> <td>12.8313</td> <td>8.5 M</td><td>MobileNetV3_small_x1_0</td> <td>68.2</td> <td>6.00993</td> <td>12.9598</td> <td>10.5 M</td><td>MobileNetV3_small_x1_25</td> <td>70.7</td> <td>6.9589</td> <td>14.3995</td> <td>13.0 M</td><td>MobileNetV4_conv_large</td> <td>83.4</td> <td>12.5485</td> <td>51.6453</td> <td>125.2 M</td> <td rowspan="5">MobileNetV4是专为移动设备设计的高效架构。其核心在于引入了UIB(Universal Inverted Bottleneck)模块,这是一种统一且灵活的结构,融合了IB(Inverted Bottleneck)、ConvNeXt、FFN(Feed Forward Network)以及最新的ExtraDW(Extra Depthwise)模块。与UIB同时推出的还有Mobile MQA,这是种专为移动加速器定制的注意力块,可实现高达39%的显著加速。此外,MobileNetV4引入了一种新的神经架构搜索(Neural Architecture Search, NAS)方案,以提升搜索的有效性。</td><td>MobileNetV4_conv_medium</td> <td>79.9</td> <td>9.65509</td> <td>26.6157</td> <td>37.6 M</td><td>MobileNetV4_conv_small</td> <td>74.6</td> <td>5.24172</td> <td>11.0893</td> <td>14.7 M</td><td>MobileNetV4_hybrid_large</td> <td>83.8</td> <td>20.0726</td> <td>213.769</td> <td>145.1 M</td><td>MobileNetV4_hybrid_medium</td> <td>80.5</td> <td>19.7543</td> <td>62.2624</td> <td>42.9 M</td><td>PP-HGNet_base</td> <td>85.0</td> <td>14.2969</td> <td>327.114</td> <td>249.4 M</td> <td rowspan="3">PP-HGNet(High Performance GPU Net)是百度飞桨视觉团队研发的适用于GPU平台的高性能骨干网络。该网络结合VOVNet的基础出使用了可学习的下采样层(LDS Layer),融合了ResNet_vd、PPHGNet等模型的优点。该模型在GPU平台上与其他SOTA模型在相同的速度下有着更高的精度。在同等速度下,该模型高于ResNet34-0模型3.8个百分点,高于ResNet50-0模型2.4个百分点,在使用相同的SLSD条款下,最终超越了ResNet50-D模型4.7个百分点。与此同时,在相同精度下,其推理速度也远超主流VisionTransformer的推理速度。</td><td>PP-HGNet_small</td> <td>81.51</td> <td>5.50661</td> <td>119.041</td> <td>86.5 M</td><td>PP-HGNet_tiny</td> <td>79.83</td> <td>5.22006</td> <td>69.396</td> <td>52.4 M</td><td>PP-HGNetV2-B0</td> <td>77.77</td> <td>6.53694</td> <td>23.352</td> <td>21.4 M</td> <td rowspan="7">PP-HGNetV2(High Performance GPU Network V2)是百度飞桨视觉团队的PP-HGNet的下一代版本,其在PP-HGNet的基础上,做了进一步优化和改进,其在NVIDIA发布的“Accuracy-Latency Balance”做到了极致,精度大幅超越了其他同样推理速度的模型。在每种标签分类,考标场景中,都有较强的表现。</td><td>PP-HGNetV2-B1</td> <td>79.18</td> <td>6.56034</td> <td>27.3099</td> <td>22.6 M</td><td>PP-HGNetV2-B2</td> <td>81.74</td> <td>9.60494</td> <td>43.1219</td> <td>39.9 M</td><td>PP-HGNetV2-B3</td> <td>82.98</td> <td>11.0042</td> <td>55.1367</td> <td>57.9 M</td><td>PP-HGNetV2-B4</td> <td>83.57</td> <td>9.66407</td> <td>54.2462</td> <td>70.4 M</td><td>PP-HGNetV2-B5</td> <td>84.75</td> <td>15.7091</td> <td>115.926</td> <td>140.8 M</td><td>PP-HGNetV2-B6</td> <td>86.30</td> <td>21.226</td> <td>255.279</td> <td>268.4 M</td><td>PP-LCNet_x0_5</td> <td>63.14</td> <td>3.67722</td> <td>6.66857</td> <td>6.7 M</td> <td rowspan="8">PP-LCNet是百度飞桨视觉团队自研的轻量级骨干网络,它能在不增加推理时间的前提下,进一步提升模型的性能,大幅超越其他轻量级SOTA模型。</td><td>PP-LCNet_x0_25</td> <td>51.86</td> <td>2.65341</td> <td>5.81357</td> <td>5.5 M</td><td>PP-LCNet_x0_35</td> <td>58.09</td> <td>2.7212</td> <td>6.28944</td> <td>5.9 M</td><td>PP-LCNet_x0_75</td> <td>68.18</td> <td>3.91032</td> <td>8.06953</td> <td>8.4 M</td><td>PP-LCNet_x1_0</td> <td>71.32</td> <td>3.84845</td> <td>9.23735</td> <td>10.5 M</td><td>PP-LCNet_x1_5</td> <td>73.71</td> <td>3.97666</td> <td>12.3457</td> <td>16.0 M</td><td>PP-LCNet_x2_0</td> <td>75.18</td> <td>4.07556</td> <td>16.2752</td> <td>23.2 M</td><tr> <td>PP-LCNet_x2_5</td> <td>76.60</td> <td>4.06028</td> <td>21.5063</td> <td>32.1 M</td><td>PP-LCNetV2_base</td> <td>77.05</td> <td>5.23428</td> <td>19.6005</td> <td>23.7 M</td> <td rowspan="3">PP-LCNetV2 图像分类模型是百度飞桨视觉团队自研的 PP-LCNet 的下一代版本,其在 PP-LCNet 的基础上,做了进一步优化和改进,主要使用重参数化策略组合了不同大小卷积核的深度卷积,并优化了点卷积、Shortcut等。在不使用额外数据的前提下,PPLCNetV2_base 模型在图像分类 ImageNet 数据集上能够取得超过 77% 的 Top1 Acc,同时在 Intel CPU 平台的推理时间在 4.4 ms 以下</td><td>PP-LCNetV2_large </td> <td>78.51</td> <td>6.78335</td> <td>30.4378</td> <td>37.3 M</td><td>PP-LCNetV2_small</td> <td>73.97</td> <td>3.89762</td> <td>13.0273</td> <td>14.6 M</td><td>ResNet18_vd</td> <td>72.3</td> <td>3.53048</td> <td>31.3014</td> <td>41.5 M</td> <td rowspan="11">ResNet 系列模型是在 2015 年提出的,一举在 ILSVRC2015 比赛中取得冠军,top5 错误率为 3.57%。该网络创新性的提出了残差结构,通过堆叠多个残差结构从而构建了 ResNet 网络。实验表明使用残差块可以有效地提升收敛速度和精度。</td><td>ResNet18 </td> <td>71.0</td> <td>2.4868</td> <td>27.4601</td> <td>41.5 M</td><td>ResNet34_vd</td> <td>76.0</td> <td>5.60675</td> <td>56.0653</td> <td>77.3 M</td><tr> <td>ResNet34</td> <td>74.6</td> <td>4.16902</td> <td>51.925</td> <td>77.3 M</td><td>ResNet50_vd</td> <td>79.1</td> <td>10.1885</td> <td>68.446</td> <td>90.8 M</td><tr> <td>ResNet50</td> <td>76.5</td> <td>9.62383</td> <td>64.8135</td> <td>90.8 M</td>
<tr>
<td>ResNet101_vd</td>
<td>80.2</td>
<td>20.0563</td>
<td>124.85</td>
<td>158.4 M</td>
<tr>
<td>ResNet101</td>
<td>77.6</td>
<td>19.2297</td>
<td>121.006</td>
<td>158.4 M</td>
<td>ResNet152_vd</td>
<td>80.6</td>
<td>29.6439</td>
<td>181.678</td>
<td>214.3 M</td>
<tr>
<td>ResNet152</td>
<td>78.3</td>
<td>30.0461</td>
<td>177.707</td>
<td>214.2 M</td>
<tr>
<td>ResNet200_vd</td>
<td>80.9</td>
<td>39.1628</td>
<td>235.185</td>
<td>266.0 M</td>
<td>StarNet-S1</td>
<td>73.6</td>
<td>9.895</td>
<td>23.0465</td>
<td>11.2 M</td>
<td rowspan="4">StarNet 聚焦于研究网络设计中“星操作”(即元素级乘法)的未开发潜力。揭示星操作能够将输入映射到高维、非线性特征空间的能力,这一过程类似于核技巧,但无需扩大网络规模。因此进一步提出了 StarNet,一个简单而强大的原型网络,该网络在紧凑的网络结构和有限的计算资源下,展现出了卓越的性能和低延迟。</td>
<td>StarNet-S2 </td>
<td>74.8</td>
<td>7.91279</td>
<td>21.9571</td>
<td>14.3 M</td>
<td>StarNet-S3</td>
<td>77.0</td>
<td>10.7531</td>
<td>30.7656</td>
<td>22.2 M</td>
<tr>
<td>StarNet-S4</td>
<td>79.0</td>
<td>15.2868</td>
<td>43.2497</td>
<td>28.9 M</td>
<td>SwinTransformer_base_patch4_window7_224</td>
<td>83.37</td>
<td>16.9848</td>
<td>383.83</td>
<td>310.5 M</td>
<td rowspan="6">SwinTransformer 是一种新的视觉 Transformer 网络,可以用作计算机视觉领域的通用骨干网路。SwinTransformer 由移动窗口(shifted windows)表示的层次 Transformer 结构组成。移动窗口将自注意计算限制在非重叠的局部窗口上,同时允许跨窗口连接,从而提高了网络性能。</td>
<td>SwinTransformer_base_patch4_window12_384</td>
<td>84.17</td>
<td>37.2855</td>
<td>1178.63</td>
<td>311.4 M</td>
<td>SwinTransformer_large_patch4_window7_224</td>
<td>86.19</td>
<td>27.5498</td>
<td>689.729</td>
<td>694.8 M</td>
<tr>
<td>SwinTransformer_large_patch4_window12_384</td>
<td>87.06</td>
<td>74.1768</td>
<td>2105.22</td>
<td>696.1 M</td>
<tr>
<td>SwinTransformer_small_patch4_window7_224</td>
<td>83.21</td>
<td>16.3982</td>
<td>285.56</td>
<td>175.6 M</td>
<tr>
<td>SwinTransformer_tiny_patch4_window7_224</td>
<td>81.10</td>
<td>8.54846</td>
<td>156.306</td>
<td>100.1 M</td>
注:以上精度指标为 ImageNet-1k 验证集 Top1 Acc。所有模型 GPU 推理耗时基于 NVIDIA Tesla T4 机器,精度类型为 FP32, CPU 推理速度基于 Intel(R) Xeon(R) Gold 5117 CPU @ 2.00GHz,线程数为8,精度类型为 FP32。
三、快速集成
❗ 在快速集成前,请先安装 PaddleX 的 wheel 包,详细请参考 PaddleX本地安装教程。
完成 wheel 包的安装后,几行代码即可完成图像分类模块的推理,可以任意切换该模块下的模型,您也可以将图像分类的模块中的模型推理集成到您的项目中。运行以下代码前,请您下载示例图片到本地。
{kind=link}
from paddlex import create_model
model = create_model("PP-LCNet_x1_0")
output = model.predict("general_image_classification_001.jpg", batch_size=1)
for res in output:
res.print(json_format=False)
res.save_to_img("./output/")
res.save_to_json("./output/res.json")
关于更多 PaddleX 的单模型推理的 API 的使用方法,可以参考PaddleX单模型Python脚本使用说明。
四、二次开发
如果你追求更高精度的现有模型,可以使用 PaddleX 的二次开发能力,开发更好的图像分类模型。在使用 PaddleX 开发图像分类模型之前,请务必安装 PaddleX 的 图像分类 PaddleX本地安装教程中的二次开发部分。
4.1 数据准备
在进行模型训练前,需要准备相应任务模块的数据集。PaddleX 针对每一个模块提供了数据校验功能,只有通过数据校验的数据才可以进行模型训练。此外,PaddleX 为每一个模块都提供了 Demo 数据集,您可以基于官方提供的 Demo 数据完成后续的开发。若您希望用私有数据集进行后续的模型训练,可以参考PaddleX图像分类任务模块数据标注教程
4.1.1 Demo 数据下载
您可以参考下面的命令将 Demo 数据集下载到指定文件夹:
cd /path/to/paddlex
wget https://paddle-model-ecology.bj.bcebos.com/paddlex/data/cls_flowers_examples.tar -P ./dataset
tar -xf ./dataset/cls_flowers_examples.tar -C ./dataset/
4.1.2 数据校验
一行命令即可完成数据校验:
python main.py -c paddlex/configs/image_classification/PP-LCNet_x1_0.yaml \
-o Global.mode=check_dataset \
-o Global.dataset_dir=./dataset/cls_flowers_examples
执行上述命令后,PaddleX 会对数据集进行校验,并统计数据集的基本信息。命令运行成功后会在log中打印出Check dataset passed !信息。校验结果文件保存在./output/check_dataset_result.json,同时相关产出会保存在当前目录的./output/check_dataset目录下,产出目录中包括可视化的示例样本图片和样本分布直方图。
👉 校验结果详情(点击展开)
校验结果文件具体内容为: ```bash { "done_flag": true, "check_pass": true, "attributes": { "label_file": "dataset/label.txt", "num_classes": 102, "train_samples": 1020, "train_sample_paths": [ "check_dataset/demo_img/image_01904.jpg", "check_dataset/demo_img/image_06940.jpg" ], "val_samples": 1020, "val_sample_paths": [ "check_dataset/demo_img/image_01937.jpg", "check_dataset/demo_img/image_06958.jpg" ] }, "analysis": { "histogram": "check_dataset/histogram.png" }, "dataset_path": "./dataset/cls_flowers_examples", "show_type": "image", "dataset_type": "ClsDataset" } ``` 上述校验结果中,check_pass 为 True 表示数据集格式符合要求,其他部分指标的说明如下: * `attributes.num_classes`:该数据集类别数为 102; * `attributes.train_samples`:该数据集训练集样本数量为 1020; * `attributes.val_samples`:该数据集验证集样本数量为 1020; * `attributes.train_sample_paths`:该数据集训练集样本可视化图片相对路径列表; * `attributes.val_sample_paths`:该数据集验证集样本可视化图片相对路径列表; 另外,数据集校验还对数据集中所有类别的样本数量分布情况进行了分析,并绘制了分布直方图(histogram.png): 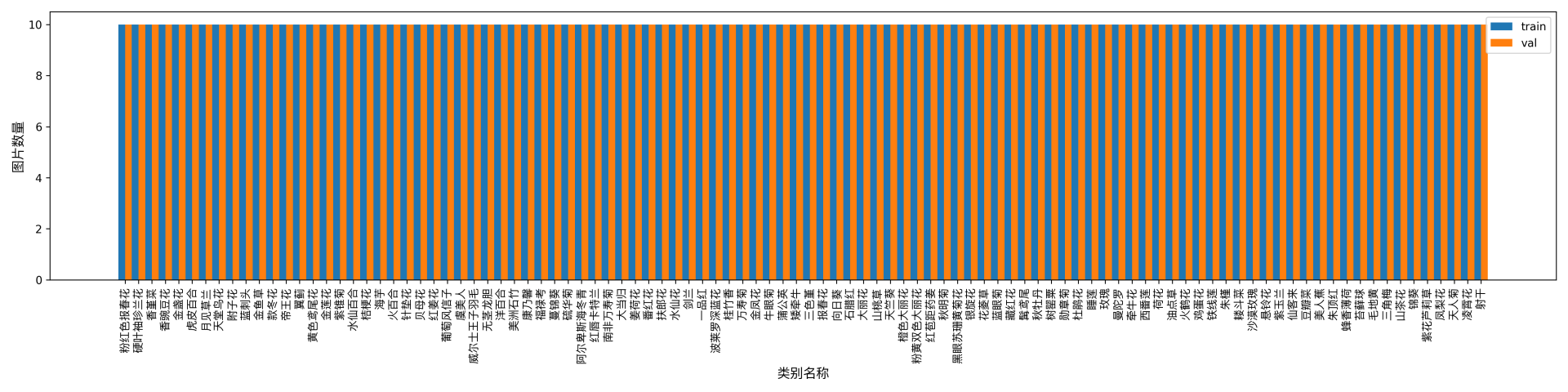4.1.3 数据集格式转换/数据集划分(可选)
在您完成数据校验之后,可以通过修改配置文件或是追加超参数的方式对数据集的格式进行转换,也可以对数据集的训练/验证比例进行重新划分。
👉 格式转换/数据集划分详情(点击展开)
**(1)数据集格式转换** 图像分类暂不支持数据转换。 **(2)数据集划分** 数据集划分的参数可以通过修改配置文件中 `CheckDataset` 下的字段进行设置,配置文件中部分参数的示例说明如下: * `CheckDataset`: * `split`: * `enable`: 是否进行重新划分数据集,为 `True` 时进行数据集格式转换,默认为 `False`; * `train_percent`: 如果重新划分数据集,则需要设置训练集的百分比,类型为 0-100 之间的任意整数,需要保证和 `val_percent` 值加和为100; 例如,您想重新划分数据集为 训练集占比90%、验证集占比10%,则需将配置文件修改为: ```bash ...... CheckDataset: ...... split: enable: True train_percent: 90 val_percent: 10 ...... ``` 随后执行命令: ```bash python main.py -c paddlex/configs/image_classification/PP-LCNet_x1_0.yaml \ -o Global.mode=check_dataset \ -o Global.dataset_dir=./dataset/cls_flowers_examples ``` 数据划分执行之后,原有标注文件会被在原路径下重命名为 `xxx.bak`。 以上参数同样支持通过追加命令行参数的方式进行设置: ```bash python main.py -c paddlex/configs/image_classification/PP-LCNet_x1_0.yaml \ -o Global.mode=check_dataset \ -o Global.dataset_dir=./dataset/cls_flowers_examples \ -o CheckDataset.split.enable=True \ -o CheckDataset.split.train_percent=90 \ -o CheckDataset.split.val_percent=10 ```4.2 模型训练
一条命令即可完成模型的训练,以此处图像分类模型 PP-LCNet_x1_0 的训练为例:
python main.py -c paddlex/configs/image_classification/PP-LCNet_x1_0.yaml \
-o Global.mode=train \
-o Global.dataset_dir=./dataset/cls_flowers_examples
需要如下几步:
- 指定模型的
.yaml配置文件路径(此处为PP-LCNet_x1_0.yaml,训练其他模型时,需要的指定相应的配置文件,模型和配置的文件的对应关系,可以查阅PaddleX模型列表(CPU/GPU)) - 指定模式为模型训练:
-o Global.mode=train - 指定训练数据集路径:
-o Global.dataset_dir其他相关参数均可通过修改.yaml配置文件中的Global和Train下的字段来进行设置,也可以通过在命令行中追加参数来进行调整。如指定前 2 卡 gpu 训练:-o Global.device=gpu:0,1;设置训练轮次数为 10:-o Train.epochs_iters=10。更多可修改的参数及其详细解释,可以查阅模型对应任务模块的配置文件说明PaddleX通用模型配置文件参数说明。
👉 更多说明(点击展开)
* 模型训练过程中,PaddleX 会自动保存模型权重文件,默认为`output`,如需指定保存路径,可通过配置文件中 `-o Global.output` 字段进行设置。 * PaddleX 对您屏蔽了动态图权重和静态图权重的概念。在模型训练的过程中,会同时产出动态图和静态图的权重,在模型推理时,默认选择静态图权重推理。 * 在完成模型训练后,所有产出保存在指定的输出目录(默认为`./output/`)下,通常有以下产出: * `train_result.json`:训练结果记录文件,记录了训练任务是否正常完成,以及产出的权重指标、相关文件路径等; * `train.log`:训练日志文件,记录了训练过程中的模型指标变化、loss 变化等; * `config.yaml`:训练配置文件,记录了本次训练的超参数的配置; * `.pdparams`、`.pdema`、`.pdopt.pdstate`、`.pdiparams`、`.pdmodel`:模型权重相关文件,包括网络参数、优化器、EMA、静态图网络参数、静态图网络结构等;4.3 模型评估
在完成模型训练后,可以对指定的模型权重文件在验证集上进行评估,验证模型精度。使用 PaddleX 进行模型评估,一条命令即可完成模型的评估:
python main.py -c paddlex/configs/image_classification/PP-LCNet_x1_0.yaml \
-o Global.mode=evaluate \
-o Global.dataset_dir=./dataset/cls_flowers_examples
与模型训练类似,需要如下几步:
- 指定模型的
.yaml配置文件路径(此处为PP-LCNet_x1_0.yaml) - 指定模式为模型评估:
-o Global.mode=evaluate - 指定验证数据集路径:
-o Global.dataset_dir其他相关参数均可通过修改.yaml配置文件中的Global和Evaluate下的字段来进行设置,详细请参考PaddleX通用模型配置文件参数说明。
👉 更多说明(点击展开)
在模型评估时,需要指定模型权重文件路径,每个配置文件中都内置了默认的权重保存路径,如需要改变,只需要通过追加命令行参数的形式进行设置即可,如`-o Evaluate.weight_path=./output/best_model/best_model.pdparams`。 在完成模型评估后,会产出`evaluate_result.json,其记录了`评估的结果,具体来说,记录了评估任务是否正常完成,以及模型的评估指标,包含 val.top1、val.top5;4.4 模型推理和模型集成
在完成模型的训练和评估后,即可使用训练好的模型权重进行推理预测或者进行Python集成。
4.4.1 模型推理
通过命令行的方式进行推理预测,只需如下一条命令。运行以下代码前,请您下载示例图片到本地。
python main.py -c paddlex/configs/image_classification/PP-LCNet_x1_0.yaml \
-o Global.mode=predict \
-o Predict.model_dir="./output/best_model/inference" \
-o Predict.input="general_image_classification_001.jpg"
与模型训练和评估类似,需要如下几步:
- 指定模型的
.yaml配置文件路径(此处为PP-LCNet_x1_0.yaml) - 指定模式为模型推理预测:
-o Global.mode=predict - 指定模型权重路径:
-o Predict.model_dir="./output/best_model/inference" - 指定输入数据路径:
-o Predict.input="..."其他相关参数均可通过修改.yaml配置文件中的Global和Predict下的字段来进行设置,详细请参考PaddleX通用模型配置文件参数说明。
4.4.2 模型集成
模型可以直接集成到 PaddleX 产线中,也可以直接集成到您自己的项目中。
1.产线集成
图像分类模块可以集成的 PaddleX 产线有通用图像分类产线,只需要替换模型路径即可完成相关产线的图像分类模块的模型更新。在产线集成中,你可以使用高性能部署和服务化部署来部署你得到的模型。
2.模块集成
您产出的权重可以直接集成到图像分类模块中,可以参考快速集成的 Python 示例代码,只需要将模型替换为你训练的到的模型路径即可。